
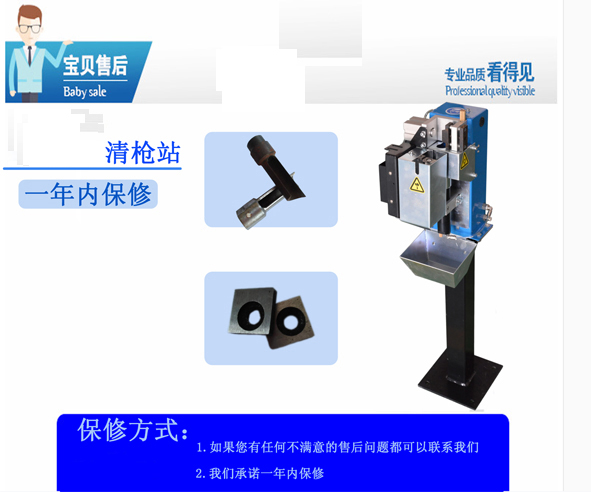
zc-2000s 三位一体清枪站
更新:2018-04-19 15:53:11 点击:
- 产品品牌 清枪站
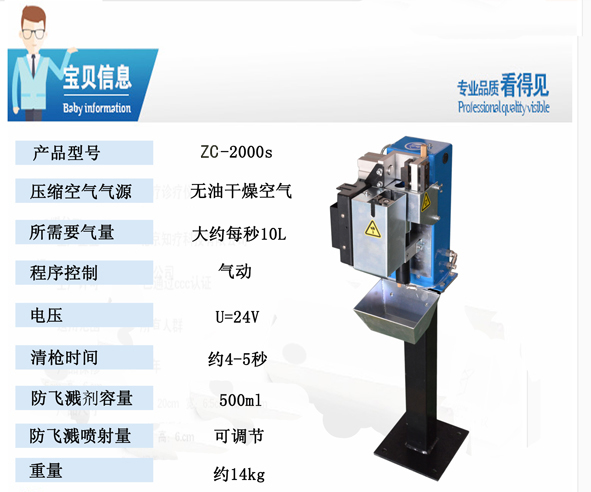
- 产品型号 zr-2000s
- 产品描述
...
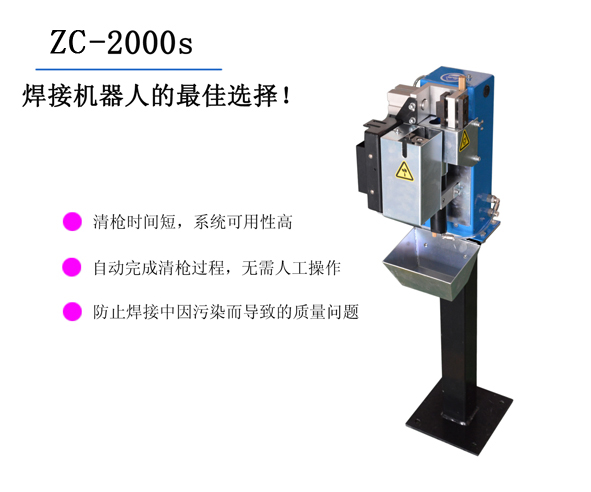
产品介绍

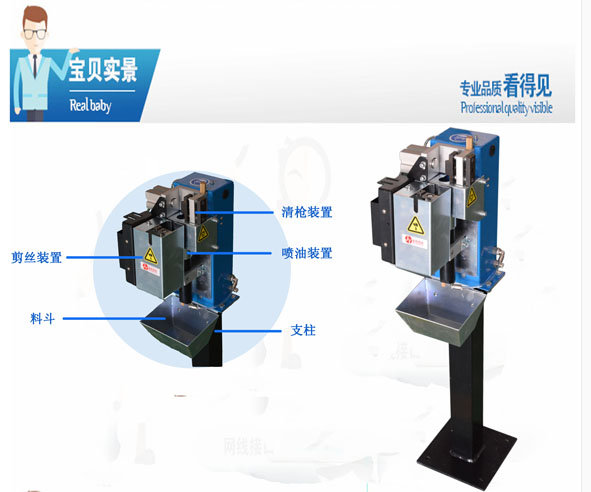
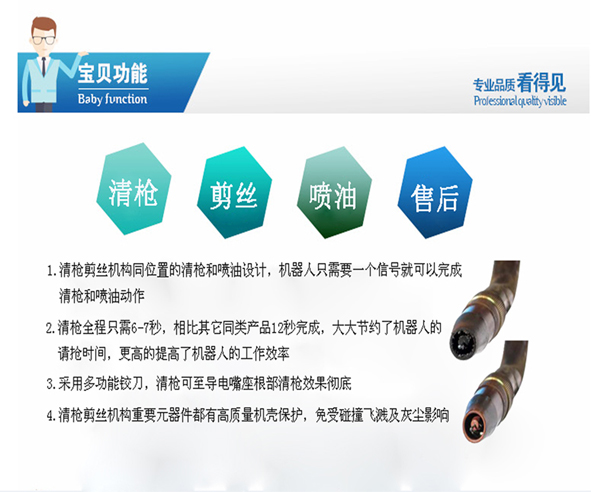

清枪站和机器人的链接方式/工作流程简介
一. 定义机器人内部信号
1、清枪信号:DO(101)
2、焊枪位移:DI(101)
3、剪丝信号:DO(102)
二. 清枪站信号接入定义
1 和 2 脚:清枪信号。
3 和 4 脚:机器人接收信号。
6 和 7 脚:剪丝信号。
5 脚信号为空
三. 清枪站和机器人编程举例
DO(101)=ON
WAIT=0.5s
DO(101)=OFF
(加紧/清枪/喷油)
----------------------------------------
----------------------------------------
WAIT DI(101)=ON
(等待位移)
----------------------------------------
----------------------------------------
DO(102)=ON
WAIT=0.5s
DO(102)=OFF
(剪丝)
----------------------------------------
----------------------------------------
四. 操作流程
1、机器人焊枪到位 发出信号--------清枪站开始工作,(加紧、清枪、喷油一次完成)---------
机器人等待清枪站加紧气缸给出信号------机器人位移到剪丝机构-------机器人焊枪到位发出
剪丝信号------剪丝完成!清枪、喷油、剪丝全部流程完成。
更多产品







